つづき
3.ターン3
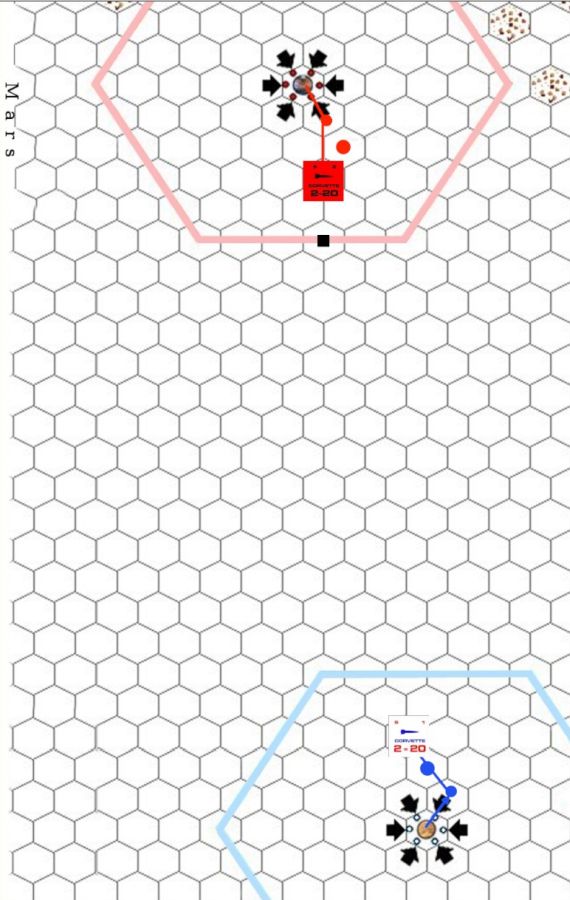
(1)B航行フェーズ
燃料を使わないでベクトル方向の慣性移動ができる。その予測位置を■で描画する。
Bは燃料節約優先なので、この慣性航行を行いながら必要なときのみ進路変更する。
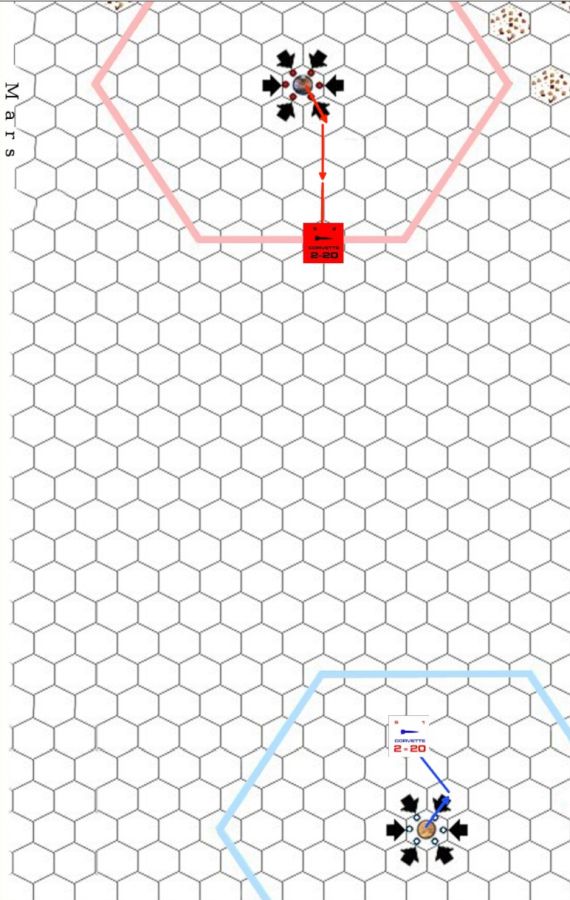
(2)B移動フェーズ
予測位置は邪魔なので、移動フェーズでは非表示にして画像取得している。(以降も同じ)
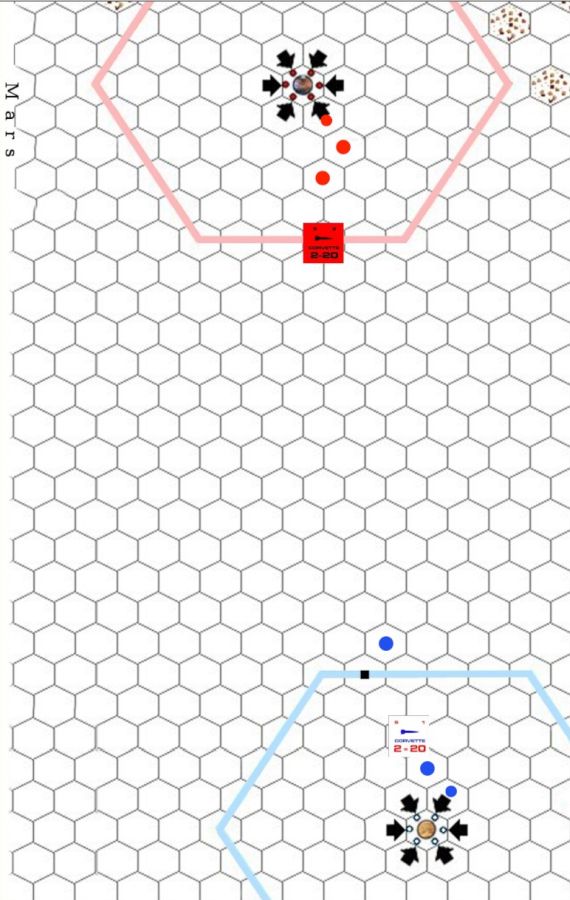
(3)A航行フェーズ
慣性航行位置■だと進路が逸れるので、燃料1回を消費して下図の予測位置にする。
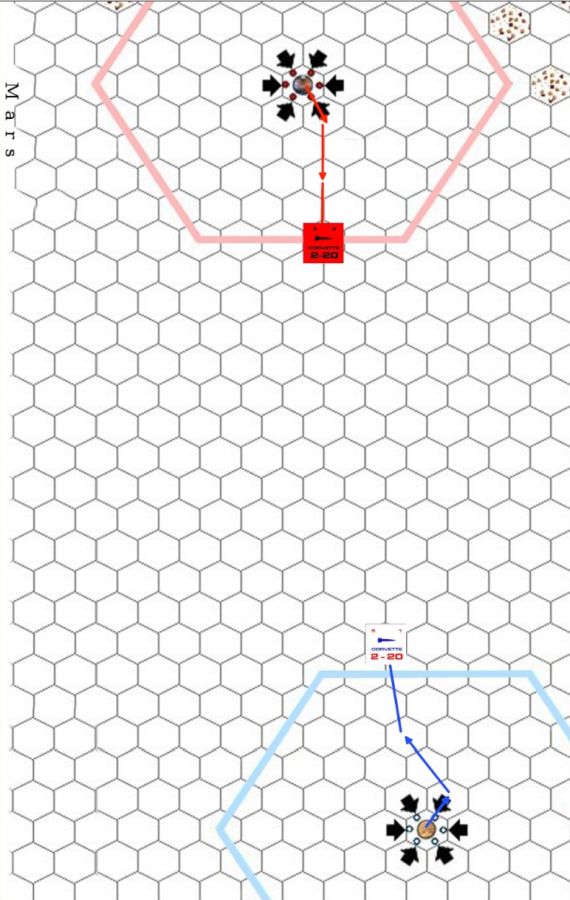
(4)A移動フェーズ
速度が3に上がったので、Bよりも高速移動できる。
次回へつづく
<個人的な感想>
予測位置のプロットは使いやすい。慣性航行の予想位置を決めてから必要に応じて
燃料を消費して方向・速度を変えた方が良いか判断できるのはありがたい。
(慣性航行の予想位置より手前に予測位置を指定すると減速になる。)